MACHINE機器情報




リハビリテーション用機器 理学療法機器
歩行学習支援ロボット Orthobot® 無線タイプ
| メーカー | - |
|---|---|
| 販売元 | フィンガルリンク |
合わせ
リストに
入れる お問い
合わせ
リストから
削除する
に入れる 比較表
から
削除する
特長
本製品は、文部科学省より開始された革新的イノベーション創出プログラム (COISTREAM)の支援を受け、京都大学COi拠点研究推進機構を中核機関として、京都大学、佛教大学、京都工芸繊維大学、関西医科大学を中心とした共同研究プロジェクトにより開発されました。本製品は、モーターとセンサーを内蔵した本体ユニットを、使用者が歩行リハビリテーションにおいてKAFO(長下肢装具)に取り付けるだけで、装着者の歩行を本来あるべき歩行運動に誘導することができる画期的なロボットです。革素材を用いて機械感を押さえた本体デザインは、柔らかなイメージで、女性やご高齢者にも違和感なくお使いいただけます。
概要
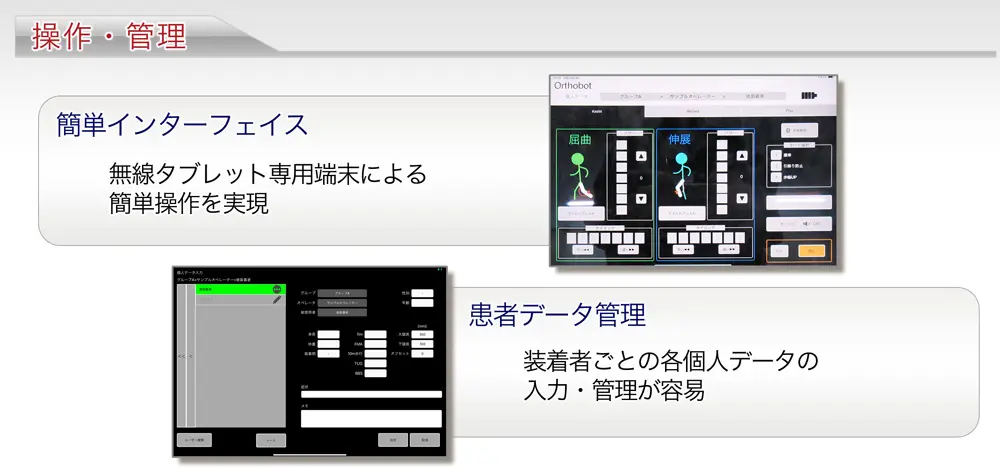
本装置は大腿姿勢から歩行フェーズを推定し、適切なタイミングでトルクを発生させるシステムである。姿勢角センサーによって装着者の歩行中の大腿姿勢角を取得し、そこから位相角を算出することで歩行周期を推定する。カルマンフィルターを用いた独自技術により、算出された位相角を安定化し、一歩目からのアシストを可能にしている。アシストトルクパターンは、歩行シミュレーションや実際の適応データに基づいて構成されているが、個人の歩行に合わせた強さや長さの調整も可能にしている。本体ユニットに内蔵されたモーターを駆動させることにより、装着者は最適なタイミングで屈曲トルクと伸展トルクサポートを受けることができる。センサーは3軸加速度センサーと3軸ジャイロセンサーからなる6軸姿勢角センサーによりモニターされ、リアルタイムで位相角を生成して、歩行状況に応じたアシストを行なっている。また、腰部と大腿部の機械的接続を不要とし、小型で着脱が容易な構造となっている。

商品ページ
仕様
| 型式 | OT-1001 |
|---|---|
| サイズ | 285x85x75(mm) |
| 質量 | 1,2Kg |
| 電源 | 14V(リチウムイオン電池) |
| その他 | 股関節の屈曲角度(可動域):0~120度 Bluetooth有効距離:約40m(使用環境により変動あり) 使用環境使用場所:屋内 周囲温度:20~28℃ 周囲湿度:30~60% 最大アシスト力:6Nm 外形寸法・重量: 本体: H28.5cm x W8.5cmxD7.5cm 1200グラム バッテリーケース: H10.2cm × W14.5cm × D5.4cm 243グラム(バッテリー含まず) タブレット: H24.8cm × W17.9cm × D6cm 458グラム(カバー含まず) 電源仕様本体電源:内部電源機器 (取り外し専用バッテリー使用) バッテリー:リチウムイオン2次電池 充電時間 :約2時間 連続稼働時間:約4時間 |
| メーカー希望小売価格(税別) | お問合せください |
歩行学習支援ロボット Orthobot® 無線タイプ 対象の方
本装置は長下肢装具にアドオンする歩行学習支援ロボットであるため、長下肢装具による歩行訓練が有用な利用者が適用となる。
また、適切なタイミングで屈曲、伸展トルクを発生させるため、長下肢装具の膝継手のロック解除下での使用が可能な段階が望ましい。
このため、一般的には自立の歩行が可能になった段階で、歩容矯正を行いたい場合に使用することが多い。
また、本装置は歩行を補助し歩容を改善する福祉機器であるため適応とされる疾患名ないが、歩行困難を有する片麻痺者や脊髄損傷者、TKA術後者の回復期及び生活期での歩行訓練の支援に役立つ可能性がある。
以下は禁忌である。
- 心臓ペースメーカー等の体内植込み型医用電子機器使用している
- 重度の高次脳障害が認められる等により指示に従えない
- 妊娠している等により正しく装着することが困難な場合
ご注文前のご相談やお見積り、資料請求など
お気軽にお問い合わせください。
-
ご相談
 ご相談・お問い合わせ
ご相談・お問い合わせ
はこちらから -
お見積り
 お見積りはこちらから
お見積りはこちらから
-
資料請求
 資料請求はこちらから
資料請求はこちらから




PAGE
TOP